




一、意大利motus tech直线运动单元,直线模组机器人设计特点:
1、机器人的设计是一个复杂的工作,工作量很大,涉及的知识面很多,往往需要多人完成。
2、机器人设计是面向客户的设计,不是闭门造车。设计者需要经常和用户在一起,不停分析用户要求,寻求解决方案。
3、机器人设计是面向加工的设计,再好的设计,如果工厂不能加工出产品,设计也是失败的,设计者需要掌握大量的加工工艺及加工手段。
4、机器人设计是一个不断完善的过程。
二、机器人设计流程:
1、使用要求的分析:每一个机器人都是根据特定的要求的产生而设计的,设计的步就是要将使用要求分析清楚,确定设计时需要考虑的参数,包括:
机器人的定位精度,重复定位精度;
机器人的负载大小,负载特性;
机器人运动的自由度数量,每自由度的运动行程;
机器人的工作周期或运动速度,加减速特性;
机器人的运动轨迹,动作的关联;
机器人的工作环境、安装方式;
机器人的运行工作制、运行寿命;
其他特殊要求;
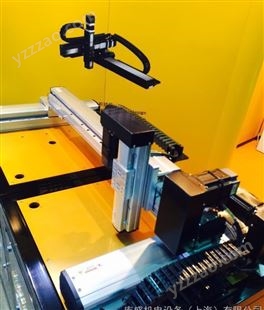
2、 本机械模型初建:机器人从机械结构分大体可分为龙门结构、壁挂结构,垂挂结构,根据安装空
间的要求选择不同的结构,每种结构的力学特性、运动特性都是不一样的。后续的设计必须是基于一个确定的结构。



意大利motus tech直线运动单元,直线模组随着直角坐标机器人的应用越来越广泛,直角坐标机器人的设计工作日益显得重要。成功的设计一台直角坐标机器人涉及到很多方面的工作,包括机械结构、动力驱动、伺服控制等等。库盛机电设备上海有限公司有着多年直角坐标机器人技术应用、数控技术和产品研发经验,我们依托韩国TPC公司直线定位系统性及机械手臂开发出了价比优良的系列数控直角坐标机器人,被广泛地应用在汽车、电子、电器、检测、医疗、航天、食品等各个领域的生产线上。







所有评论仅代表网友意见,与本站立场无关。