

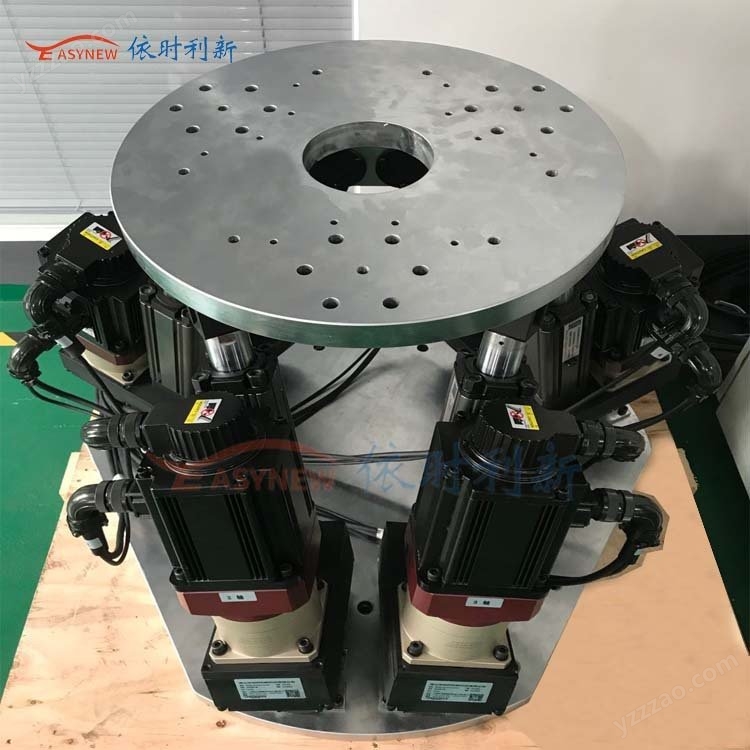




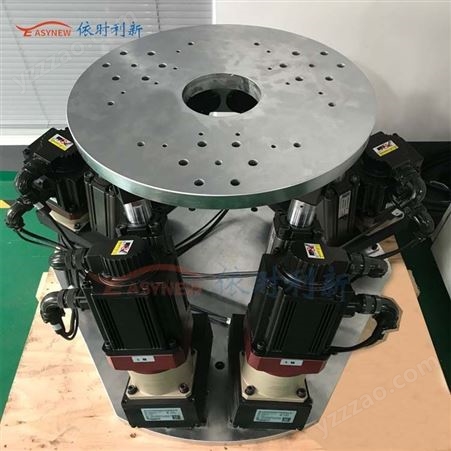



伺服电动缸纯电动六自由度平台系统由采用Stewart机构的六自由度运动平台、微型控制器、伺服驱动系统等组成。六自由度运动平台(如下图)的下平台安装在地面上,上平台为运动平台,它由六只电动缸支承,运动平台与电动缸采用六个虎克铰连接,电动缸与固定基座采用六个虎克铰连接,六只电动缸采用伺服电机驱动的电动缸。计算机控制系统通过位姿-缸长解算,通过驱动伺服电机改变电动缸缸长,以实现运动平台的六个自由度的运动。主要技术指标:平台有效载荷:2000KG整体外形尺寸:2310×2580×1110mm姿态位移速度加速度纵倾//俯仰(α)±15°±20°/s60°/s滚转(β)±15°±20°/s60°/s偏航(γ)±15°±20°/s60°/s垂直升降(z)±175mm±250mm/s0.3g纵向位移(y)±220mm±250mm/s0.3g侧向位移(x)±220mm±250mm/s0.3g六自由度平台控制系统简介: 六自由度平台系统控制流程简述如下,微型控制器接收到有关平台运动参数的指令后,经过空间运动模型变换,反解运算,补偿运算,得出六只电动缸的伸长量,通过总线传递给驱动器,由驱动器内部PC得到信息并驱动电动机转动,电动缸按照指令伸缩,平台亦运行到姿态。而安装在电动机上的编码器实时检测出电动机的力矩,速度,位置信息并发送到驱动器,构成电动缸闭环控制系统,以实时精确地控制各电动缸的伸长量,同时信息传输给微型控制器,微型控制器通过正解运算,计算出平台实时姿态,实时调整平台姿态,以作为下次动作指令的参考,以确保控制精度。特点:a.平台位姿模拟、正弦波模拟、单自由度运动、多自由度复合运动,姿态复合。b.预置路谱滤波处理,随机波复现,路谱、海浪谱、飞行谱复现等功能,可导入车辆、飞行器实际测量姿态数据。c.通过TCP/IP协议,为用户提供第三方控制接口(上位机接口),提供二次开发例程。d.提供内同步、外同步数据输出控制接口,实时正解运动轨迹,指令与姿态实时对比。










所有评论仅代表网友意见,与本站立场无关。