

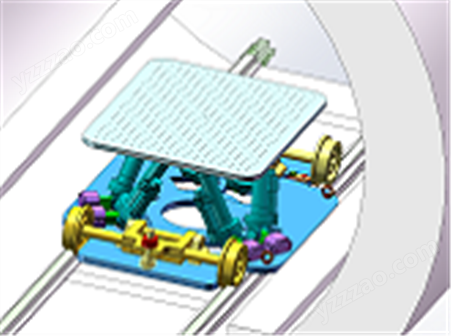
产品介绍:
系统控制流程如图所示,多自由度微型控制器接收到有关平台运动参数的指令后,经过空间运动模型变换,反解运算,补偿运算,得出六只电动缸的伸长量,通过总线传递给驱动器,由驱动器内部PC得到信息并驱动电动机转动,电动缸按照指令伸缩,平台亦运行到姿态。而安装在电动机上的编码器实时检测出电动机的力矩,速度,位置信息并发送到驱动器,构成闭环控制系统,以实时精确地控制各电动缸的伸长量,同时信息传输给微型控制器,微型控制器通过正解运算,计算出平台实时姿态,以作为下次动作指令的参考,以确保控制精度。









所有评论仅代表网友意见,与本站立场无关。